●はじめに
lin_guiderにおいて、ガイド制御のためにユーザーがいじれるパラメータはPID制御用の各係数です。その名の通り、P、I、D、3つの制御係数が存在しますが、lin_guiderではD制御(微分制御)は使用していません。
実質的にPI制御となっています。
さて、そのPI制御の係数ですが、それぞれどのような効果があるのか、ガイドにどのように影響するのかイメージしにくいものです。
簡単に言うと、
 P制御=比例制御
P制御=比例制御目標値へ近づけるための応答性能。
より素早く目標値に近づけるための制御。
I制御=積分制御
偏差の解消。
目標値ぴったりに合わせるための制御。
という役割を果たします。
それぞれの制御に必要な係数をそれぞれ、Pゲイン(Proportional gain)、Iゲイン(Integral gain)と呼びます。
lin_guiderのガイダーダイアログでは図のようにRA側、DEC側、それぞれの制御にパラメータを設定できるようになっています。
今回はこのパラメータを変化させて、実際にガイド動作がどうなるのか観察してみました。
●実験方法
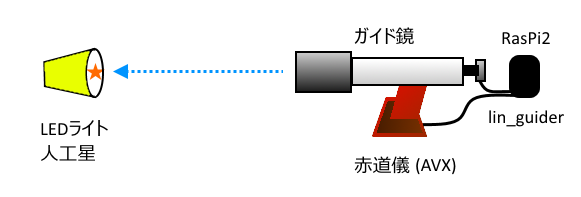 LEDライトを使った人工星に対してガイド鏡を向け、ガイドカメラを通じでlin_guiderでオートガイドを実施します。
LEDライトを使った人工星に対してガイド鏡を向け、ガイドカメラを通じでlin_guiderでオートガイドを実施します。赤道儀はCelestron Advanced VXを使用し、イニシャル状態(電源を入れてセットアップしない状態)のまま、ガイド信号のみで駆動するようにしました。
また、実験はDEC方向のみを使用します。
目標位置から一定距離離れたガイド星に対して、ガイドする方法で実際のデータを採ります。
グラフの縦軸はDelta値(ズレ量)、横軸は時間(秒)をプロットします。
■P制御
Pゲインを533~16の間で固定し、ガイドを観察しました。
グラフ(P-1)
P値が高いほど勾配は急になります。また、一定値以上になると目標値を大幅に行き過ぎるオーバーシュートが発生し、その後も大きな上下振動をくり返すハンチングが見られます。

グラフ(P-2)
グラフ(P-2)は経過前半を抜き出したものです。
P=133、P=533の時は目標値を行き過ぎてもすぐに反応し、反対動作へと移る傾向が強いが、P=16の時は、オーバーシュートに対しても即応せず、反応が鈍くなっているのが分かります。
つまり、Pゲインが低すぎるとエラーへの反応が鈍くなり、エラーが解消できないままガイドが進む可能性があります。

グラフ(P-3)
P=533(紺色)の場合、エラーへの応答が素早く行われ、常に反対動作が行われているため、グラフがギザギザした形になっています。
目標値を中心に振動しているので、安定しているように見えるが、常にガイド鏡がフラフラと微小振動している状態であることを考えると、あまりよい状態とは言えないでしょう。
P=16(水色)の場合、目標値へ近づけようとしている様には見えません。一定のエラーを保ったまま動作が停止しているような状態に見えます。
目標値との差を偏差と呼びますが、このように固定化してしまった偏差を定常偏差と言います。
P制御のみだと計算上この定常偏差が解消できません。
P=133(黄色)の場合、振動後の偏差を下げる動きがみられます。P=533とは違い、徐々に近づける動きになっているため、ガイド鏡の挙動も安定しているものと考えられます。
■考察
Pゲインのまとめ- 値が大きくなると即応性が上がるが、ハンチングが増える。
- 値が小さいとゆっくりと反応し、定常偏差が残る。
Pゲインの初期値はガイダーダイアログにてlin_guiderが計算した値が表示されています。(Guding rate = 0.5 の時、P=133.33)
この値をPゲインの中心値として考え、調整するのが良いようです。
■I制御
Pゲインを133.33に固定し、Iゲインを0~66の間で変化させた時の様子を観察しました。
グラフ(I-1)
若干分かりにくいですが、グラフ(I-1)のように、Iゲインを変化させてもほぼ同じような動きをします。
ただ、目標値への近づき方が変わってきます。

グラフ(I-2)
グラフ(I-2)は前半の様子を抜粋しました。Iゲインが大きいほど深い位置から立ち上がっています。
これは、Iゲインが大きいほど侵入傾斜が大きい初期に深く落ち込むことが原因と考えられます。

グラフ(I-3)
グラフ(I-3)は安定誘導の様子です。
I=0(紺色)の場合、目標値へ近づく動作が徐々に行われているのが分かります。
I=2(黄色)の場合、目標値から付かず離れず、乱れが少ない状態で安定している期間が長くなります。
I=66(水色)の場合、50秒以降に目標値に近づいたと思ったら急なハンチングが発生したり、偏差が残る期間があったりと、不安定な場面がみられます。
■考察
Iゲインのまとめ- Iゲインが無い場合、偏差の収束は一定間隔で繰り返されている。
- Iゲインが大きい場合、動作が安定せず予想外の動きを起こすことがある。
Iゲインの存在は偏差に対する補正を効きやすくする効果があります。
値の変化がどの程度、偏差収束に役立つのか、応答性能に影響するのかが分かりにくいため、実際のガイドでは小さい値から始めて、その都度トライ&エラーするのがいいように思います。
●まとめ
Pゲイン、Iゲインのガイド動作における影響のイメージがなんとなく理解できました。実際のガイドでは様々な要因でエラーがふらつくので理屈どおりにはなかなか行かないでしょう。
特にエラーの多い状況では即応性を取るのか、安定性を取るのか悩みどころです。
今回は人工星を使用した屋内環境において、シンチレーションや実際の赤道儀動作のエラーを無視した理想的な星のガイド環境で行ったため、実際のガイド条件ではもっと複雑な考察が必要になります。
しかし、初期値としてのPゲイン、Iゲインの範囲を頭に入れておくだけでもガイド調整に役立つでしょう。

0 件のコメント:
コメントを投稿